|
|
 發表於 2016年2月9日 11:57 AM
|
顯示全部樓層
發表於 2016年2月9日 11:57 AM
|
顯示全部樓層
本帖最後由 u3350829 於 2016年2月12日 06:13 PM 編輯
照K大的PID參數做第一次首航,因為都還在
測試所以飛低空懸停觀察抗風和基本動態為主
,只飛20分鐘就降落是因為在下以前用其他飛
控都會把pitch反轉,結果在pixhawk上真的變
反轉XD~,只能先降落改遙控器設定(汗
由log來看各方面似乎都還ok(振動小,懸停電流
約14.xA,電池/電機/ESC沒有異常發熱...等等),
除了機子剛通電會一直呈現compass inconsistent
的錯誤,但是把機子拿起來轉半圈就一切正
常了,改過供電和換Lipo電池也是一樣...
原因不明;;;
等電池再次充滿就開始來測試把電池放電到
低壓警報響能飛多久:)
Log檔: log
---------------------分隔線----------------------------
剛剛完成懸停測試,自穩起飛切position然後懸停
在3M左右,飛到電池低壓警報響(在下設定19V)
降落,總懸停時間79分鐘左右(log),用三用電錶
測量電池電壓20.20V,用PL8立刻充電到滿充入
8763mAh電量,吃電流平均都在14.xA而若油門幾
乎全開全速前進的話最大瞬間電流可以吃到24A,
還在30A範圍內,所以理論上不要太用力亂飛的話
應該可以輕鬆超過60分鐘飛行時間
不過目前的PID值設定還需要調整,加上機子有
點輕且軸距短抗風能力比較差,強一點陣風吹
來偏移比較大且修正速度慢了一點點,下一步
應該會先調整PID值,之後拿鉛塊來配重看能不
能增加多一些抗風能力,因為飛行時間超過一小
時對在下而言是多了一些;;; 等PID調整好再來回報數值.
PS:以上消耗電流因為在下DC電流句錶壞掉目前沒有校
正過,所以直接打上電源模組和Pixhawk數傳到地面站的
數字,僅供參考不一定準.
---------------------分隔線----------------------------
第二次懸停測試,這次有校正好電流計(電流數值直接
砍半;;;)並且把自穩的P值加大到7.5(原本6.0),抗風性
能有好很多,不過應該1355圓槳搭配的關係陣風大一
點就會掉高度,等過年完買小一點的槳(1238?)和尖槳
來測試是一定要了,不過1355圓槳效率超好以下面這
個電池只剩下18.xV的情況來算g/W依舊有超過10,下
一次測試就集中在PID調整上了.
充電完成順便提供充電資料,最後充入9703mAh電量
電壓由18.4V開始充電.
Log檔:(log過大只能上傳最後電池快沒電的三分多鐘部份)
Log
---------------------分隔線----------------------------
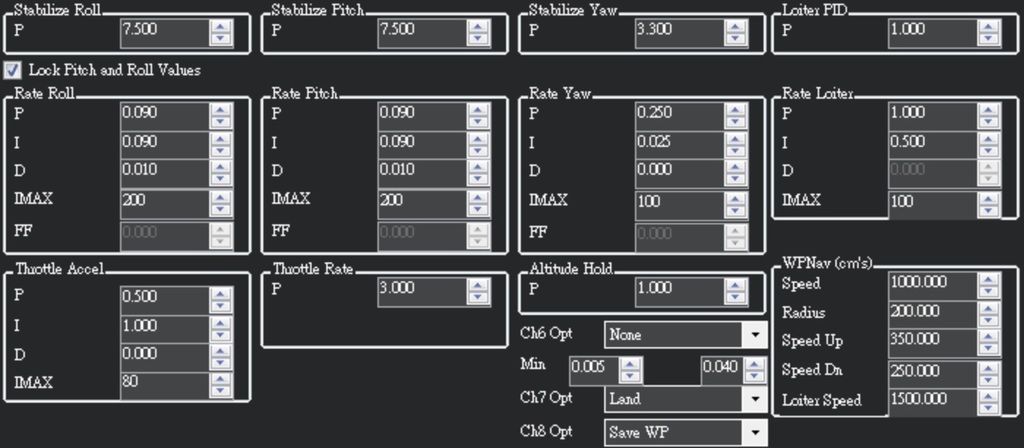
在下飛ACRO mode(關閉所有自穩設定)最後調出來
適合在下自己的PID,看數值和K大的PID果然有一
段差距,代表飛控介入量大了很多,不過對在下這
種弱弱的技術力來說已經算ok了,未來如果還要更
加強只能換更好的ESC來開閉環和煞車重調PID了吧?
PID數據:(僅供參考XD)
PS:本來應該有log的,但是之前比對數據後忘了裝上....Orz
這兩天如果還一樣好天氣就用最後數據飛再上傳log.
|
|

