|
|
樓主 |
發表於 2015年3月19日 10:19 PM
|
顯示全部樓層
要事先都鑽好不太可能,這邊有NAZA/Mini APM/Pixhawk三種飛控,GPS也都不一樣.
中心板:
*上板就挖些洞(偷輕+方便出線)即可,飛控都是採雙面膠固定在上板的中心點,不必為不同飛控鑽不同孔!
*下板則不要偷太多(需支撐所有重量),開些直線孔讓電池綁帶可以穿過方便固定電池即可,不必為電池去做專用座.
腳架:
可以參考105樓已下架那一台(看起來像M3螺絲鎖上的).
機臂:
機臂與中心板的接合及機臂上的電機座就照大大畫的圖即可.
我這邊的5台這樣就可以了,如果要鑽孔我這邊可以處理.
這個級距的機子要超過10分鐘已不太容易,而我的目標是25分鐘+半徑5KM的配置.
Y6很會挑機架,所以我這邊肯定會做變更才能達到目標.
比較重要的是測INS_MPU6K_FILTER值,每台機架都有固定的頻率,我到時會開孔來調.
軸距也可能因6*3及6*4.5上下層槳而有異動(縮的可能性較大),我會把最後的結果告訴大大,再把APM的調參檔(就是除了校正以外的值)給你,你再自己決定怎麼做.
基本上就是刷好固件做完ACC/羅盤/遙控器校準,再把那個調參檔讀入就可以飛很好了.
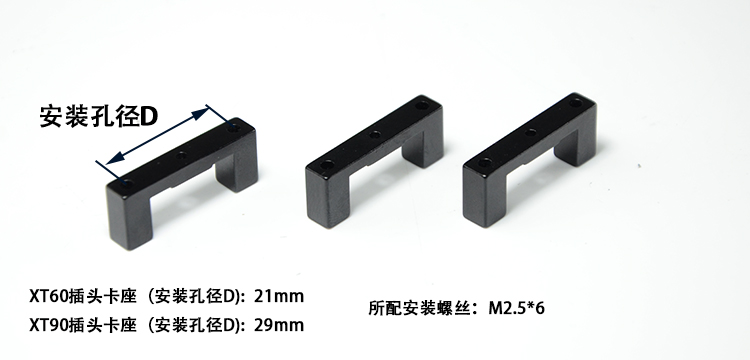
XT60間距是21mm,如圖:
|
|


 發表於 2015年3月20日 02:00 AM
發表於 2015年3月20日 02:00 AM









