|
|
 發表於 2016年5月6日 05:52 AM
|
顯示全部樓層
發表於 2016年5月6日 05:52 AM
|
顯示全部樓層
本帖最後由 u3350829 於 2016年5月6日 06:02 AM 編輯
在下從年初開始照著K大建議的spec開始build自己的
四軸FPV機到現在這台525mm軸距四軸也以飛了5X趟
,總里程數累積真的可以台北屏東來回還有剩了XD
這邊回報一下在下的淺薄心得:
1.電池:因為在下使用三洋18650GA並組成6S3P當電池
其電量/重量密度真的非常優秀,不到900g的重量就能
提供你將近10000mAh的電量,當然有優點也會有缺點
,這電池在1C(也就是差不多每P輸出3A)左右放電的
話實際電壓從24.xV降到22.xV這段速度蠻快的,導致
後面消耗電流就會拉高,所以想要飛的久必須控制油門
不能像一般LiPo或CCNB那樣大車(相對會更耗電),另
一個問題就是18650電池本身的磁干擾,必須讓飛控和
GPS遠離電池4cm以上,不過這點K大已經提過很多次就
不贅述.再來就是充電時間,原廠spec上建議是1.6xA最大
充電電流(比0.5C還小一點),即便你自己拉到1C電流充電
還是需要相當長的時間,沒辦法像別人一樣一顆飛一顆充
飛完剛好另外一顆可以再上.
2.機架: 其實自己裁切碳纖維方管來做難度真的不會很高(
在下新手也能一次成功),只是需要細心和慢工出細活的態
度去做,很多部份沒有專業工具(ex:雕刻機,洗床,鑽台)真
的要慢慢手工打磨比較ok,電動工具下去通常都是會過頭.
至於中心板和上層板則是建議最少買450軸距以上的來用,
如果太大再自己裁切掉,畢竟我們不是高手技術力更是有限
,夠大的中心和上層板可以省掉你很多佈線和防電磁干擾擺
設的問題,甚至你要做GP天線的地線也有更多地方可以固定
不用拼人品讓它懸空太多.
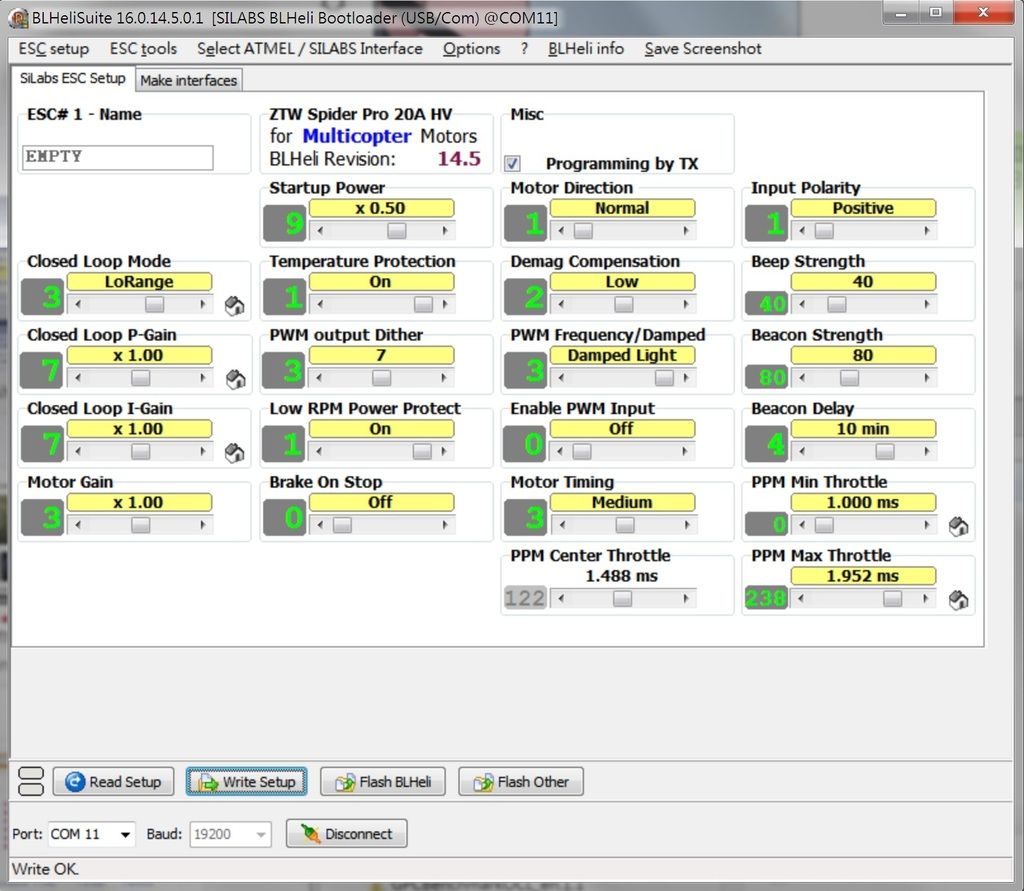
3.變電: 其實前面零件List有提到在下用的就atmel的便宜30A
電變然後自己刷Behlie韌體外加簡單補焊一下電變上面的小
零件而已,固定在機架方管上面方式則是泡綿雙面膠加一條
束帶,之前這樣飛3X趟直到最近為了減重和開閉環+煞車換
了SiLabs系的20A電變都沒什麼問題,主要還是機架+電池重
量輕,電機+槳效良好加上又沒有大動作的亂飛所以其實每
顆電變使用的電流只有2~4A,以致電變負擔很輕的關係.至於
後面換上新的電變目前只飛10趟左右而且閉環+煞車在下還
在努力摸索調整就沒辦法提供實際心得,只是覺的13"槳和
525軸距下效果似乎沒有大槳和長軸距機子那麼明顯.
4.FPV相關: 老實說這部份在下最頭痛,在下居住這邊的河道
電磁干擾真的超嚴重,即便使用5.8gHz 2W的圖傳配上大平
板天線或者使用超多圈的極化螺旋天線外加飛高400m都無
法突破3.2km的距離....同樣的設備拿去八里台北港飛海上
10km都還很清楚;;;所以在在下常飛的河道這邊就乾脆使用
600mw圖傳不飛太遠了.
至於這部份零件尤其是使用的頻率和天線真的必須實際測試
,昂貴的天線效果真的不一樣比較好,像在下最後的測出來
反而是1xxNT的三葉天線效果最好,鏡頭方面在下是直接用
Runcam,唯一的改動就是把電池換成80mAh的來減輕重量.
5.雲台: 本來這台主要是FPV機並沒有要以空拍為目的,但是
因為朋友慫恿(實際上就是要拉人一起跳坑)所以才裝設,這
也是前面提到機子正在減重的主因,在下為了把裝了兩軸雲
台(攝影還是用Runcam HD)後的起飛重量控制在2kg以下研
究了好久,最後採用國外3D列印的DIY雲台,用這個可以把
整個雲台含Runcam的重量控制在驚人的100g以內,雖然缺
點是無法抗太大的風和太高的g加速度,但畢竟在下的機子
本來就不會大車亂飛所以很合適! 不過雲台調校那個PID真
的沒有比Pixhawk簡單多少是比較麻煩的部份;;;
至於雲台電源在下是用12v BEC加上低電流的保險絲直接吃
電池供電,當電流超過雲台平常耗電量就燒斷保險絲,寧願
雲台失去功能也不要影響機子正常飛行.
6.雜項: 其他電機(ex:馬達,OSD,GPS...等等)其實就沒有比較
特別的心得可以寫,雖然馬達的動態平衡作法好像可以提一
下,但是很不幸的在下照網路上影片的作法平衡出來的結果
比不做還糟;;;;
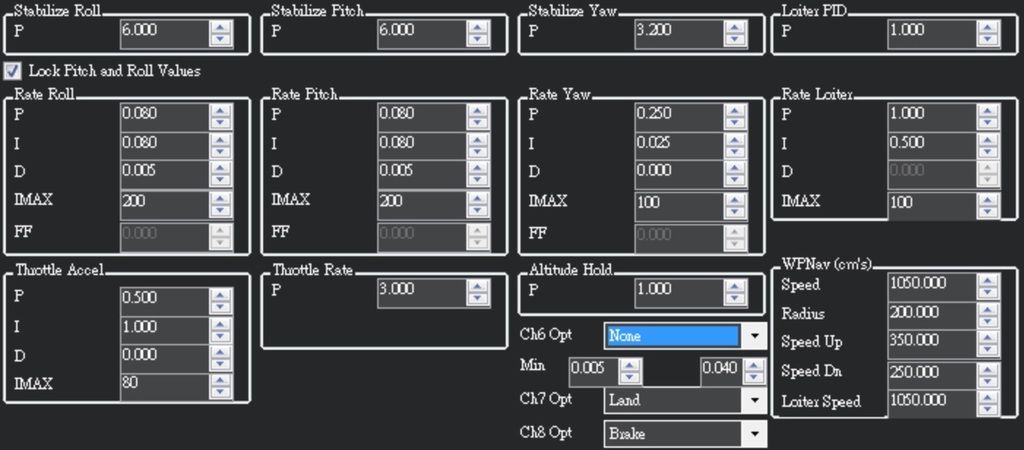
另外就是在下為了減重把原始版本的Pixhawk換成了
Pixracer V1,兩者的重量差快30g左右,不過這部份等在下
整理好應該會寫在另外一篇Pixhawk調校那邊,這樣比較有
分類這邊就不提了:)
最後感謝看完在下寫的很亂的心得,其實真的要寫應該像K
大一樣一個過程就做紀錄比較能提供參考價值.
|
|
 [複製鏈接]
[複製鏈接]


 樓主
樓主