|
|
本帖最後由 lliu0130 於 2018年3月1日 02:26 AM 編輯

前言:
我自己也是摸Vbar 沒多久, 如有任何錯誤,歡迎大家隨時指正, 以免小弟傳遞錯誤的訊息.感謝.
此篇主要以 VBar Pro 為主. 在前幾篇文章有提及, VBar Express 是你要去適應它的手感, 因為內建的 EXPO無法取消, 固定且適中的滾轉率雖然會讓一開始VBar 的人感到驚豔.而 Mikado也很厲害的是,用這些內定的設定值,玩家只要調整感度, 從450級到700,800級就有不錯的機體反應.
但當您飛一陣子,就會開始覺得,中立點愈來愈不明顯,不黏手.尾舵的反應不是那麼即時,或自旋速度,滾轉率開始變慢.尤其機體愈大愈明顯.如果您有這感覺,代表昇 Pro 的時候已來到了.
因為沒升Pro前.
1.Cyclic 有 15% EXP, RUDD 50% EXP無法取消.
2.無法改變滾轉率.
3.必須犠牲遙控器訊號線性度來改變各軸變化速度.
4.一段時間.中立點手感開始不黏手.
5.左右自旋速度不可調整
6.尾舵左右煞車速度不可調整
7.尾舵對循環,集體螺距補償不可調整.
8.遙控器如中立點訊號會飄,VBAR 死區不可調整.
9.升降,副翼滾轉率不可分開調整.
10.無法使用0-3通道.
11.十字盤在集體螺距上下限水平不可再精調.
12.無法根據槳的輕重來調反應度.
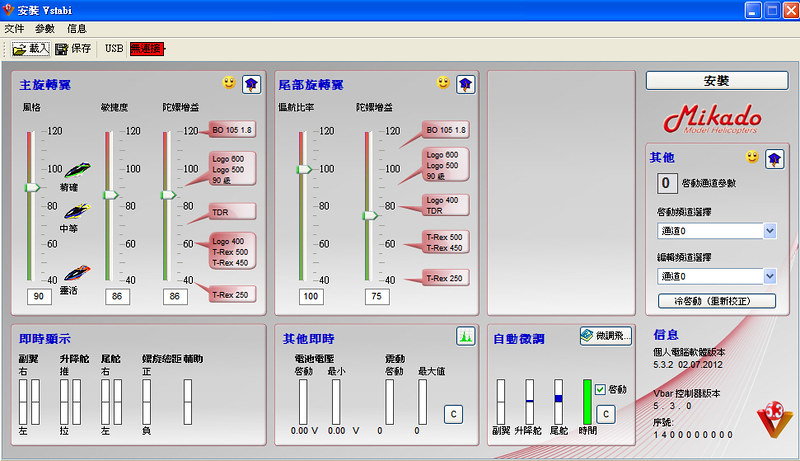
升了Pro後,你可以把Vbar 內建EXP取消為0,控的 ELEV/AILE DR/EXPO: 也為100/0 下用風格來調"黏手度", 用敏捷度調滾轉率那種在訊號維持線性度下,體驗那種穩定中帶利度的手感.
所以在VBar Pro 校正完, 最後一個步驟就是進行飛場測試. 這些細微的調校會讓直昇機來適應你的手感.當然還有許多的小技巧.在這裡列出較為常用的調校法.而在進行下列調校前,直昇機須已可在排除地面效應的高度能夠穩定的停懸,尾舵可穩定的鎖尾.
1.尾舵感度調校
先進行下列動作來調整尾舵感度.
A.順,逆,側風停懸.
B.左右橫移
C.高速航道急彎.
在上述動作中,只要看尾舵是否有適當鎖好,至於是否會擡頭,機身偏離,傾斜都先暫不管.
2.升降舵預設補償調校
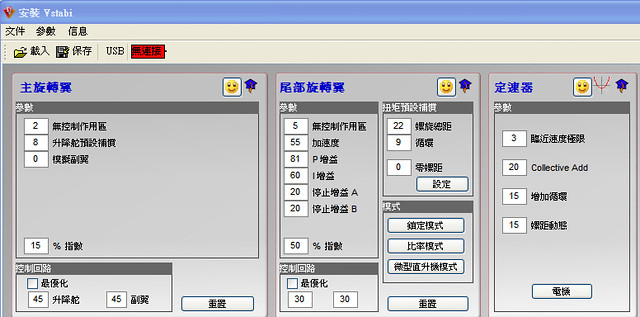
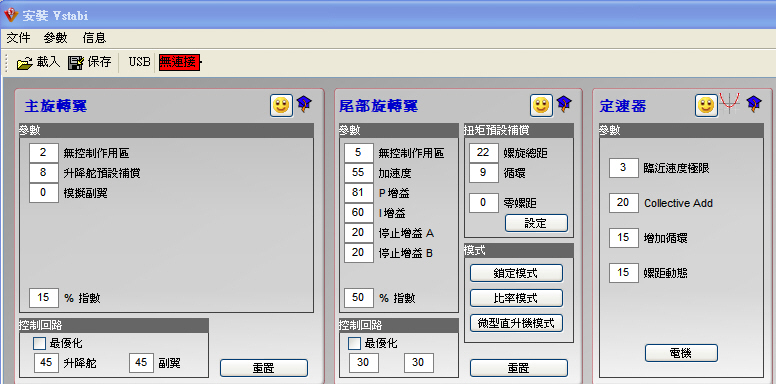
停懸後保持水平,開始慢慢垂直拉昇,逐次加快拉昇的速度(加大集體螺距).在過程中是否有機首擡頭或後退,前進現象,而沒有保持水平? 如是,則調整如下方畫面中"主旋轉翼/專家模式/升降舵預設補償調校"的值.如果拉昇時,尾部下垂或下降時則調小,尾部上揚則調大.
另外,在拉昇過程中在最大正螺距拉昇機體的傾斜度大於在中角度螺距拉昇時,則要檢測十字盤在最大正負螺距是否有保持水平.而在最大集體螺距拉昇時,如果有失速狀況,則要檢視是否轉速提供足夠昇力,是否電池C數不足,還是最大螺距太大等因素.
3.十字盤在最大正負集體螺距水平調校
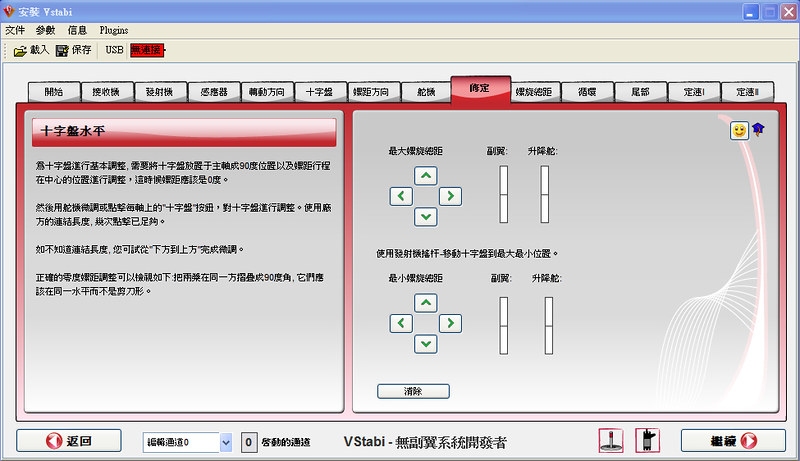
如步驟二中,在拉昇過程中在最大正螺距拉昇機體的傾斜度大於在中角度螺距拉昇時,則要檢測十字盤在最大正負螺距是否有保持水平.這時就要進入 "安裝/修定/十字盤水平/專家模式" 中來調整.首先遙控器的螺距曲線拉一直線,接著油門拉到最大,這時.可以用十字盤配平器搭配校正.
在最大正集體螺距時,用下方畫面中的最大螺旋總距的4個按鈕來調整.上下為升降,左右為副翼.右方會顯示微調值.接著油門拉到0 (最大負集體螺距), 再調整下方畫面中的最小螺旋總距的4個按鈕來調整.上下為升降,左右為副翼.右方會顯示微調值.
4.十字盤角度調校
VBar 的自動微調是很棒的功能.在機體重心OK,調校OK.但有時在動態平衡還是會有誤差.所以自動微調功能可以自動 trim ,讓機子可以精準的飛行.但這必須是在無風或微風的日子下進行.但, 有時要等無風的日子很難.所以十字盤的角度調校是一個不錯的方式,讓機體自旋時不會偏移軸心.
以下調整方式為升降伺服在主軸後方,副翼、螺距伺服在前的直昇機為例。在風向穩定的天候下, 直昇機先停懸至可排除地面效應影響的高度.接著慢速向左自旋90度,當轉90度後,在未動到升降時,直昇機是否會自行往前飛? 如會則如下方畫面中在VBar 十字盤專家模式裡的十字盤旋轉選項往左(逆時針)旋轉二度。用按鈕一次是五度,二度則可直接用輸入的方式改下方數字角度。改完可以直接拔USB再昇空試機,是否有改善?反之如慢速右旋90度會自行前飛則十字盤右旋(順時針)二度。基本上在正負五度內可以調到精準在的原地自旋,但建議十字盤旋轉角度如大於三度,則應回頭查機械結構、機體重心。

5.自動微調
這功能主要在配平機子, 其目的不是讓你可以穩到放手停懸.而是在3D時,動作能更精準到位.以下是調校過程.當然如果您用前第四步驟十字盤角度調校功能也有同樣功效.所以步驟四,五選一樣進行調整即可,
電腦準備動作
1.進入 VBar 電腦畫面. USB線連接VBar及電腦.開遙控器, HOLD, BEC 送電.
2.在VBar電腦畫面.勾選自動微調啟動. Express 版自動微調功能無法取消。
3.BEC斷電,USB線分離.
進入VBar自動微調模式
注意:此調校要在無風或微風狀態下調校,不然會失準.
遙控器油門全開後,HOLD打開BEC送電.這時十字盤會在最大正集體螺距的位罝.並且跳二下.注意,這時油門不要回到負螺距, 不然VBar 會認為校正已完成.這時把搖桿回中立點偏上螺距約2度左右,準備起飛調校.
另外.VBar 是認集體螺距曲線100%,而不是認油門100%.有些電變在校正油門時要全油門才會進入.但這時如果你的油門是 0-50-100, 螺距曲線也是 0-50-100, 這時Vbar 會先搶先進入自動微調模式而不是電變油門校正.所以如果你是要做電變校正,可以暫時把螺距曲線STK IN : 100, STK OUT:50.
例如我的700E是飛卡斯特定速,Normal 是30一直線,Hold油門是在13%假停區,再用THRO CUT 給0的訊號,做雙重保險.為了調校,我暫時把HOLD調到0%.也就是卡斯特送電就進入準備狀態.
進行自動微調
昇空後,用你平常飛行的轉速來進行微調.停懸約在你的視線高度左右,以消除地面效應.接著停懸在定點及定高度60秒左右.儘量不要大幅移動直昇機, 小量的修正OK.接著重覆下列步驟,
一、以每次2-4秒左右不動升降及副翼,它可能會漂移.2-4秒後修一下來回數次。
二、用左右自旋數圈來驗證自旋是否仍持續偏移。
如果會偏移再重覆步驟一,您會感覺每次自旋會愈來愈準。您可以先不用管是否已一分鐘,就在無/微風天候下,重覆一,二步驟直到您覺機體的自旋偏移OK為止。這樣可以省去數次的起降時間。
您覺機體的自旋偏移OK時降落,並且油門/螺距打到底(0%), VBar才會知道校正已結束。這時BEC斷電10秒後再送電後回到Vbar 電腦畫面,取消自動微調啟動功能.這時你會看 VBar自動微調右方為綠色長條狀,表示自動微調的時間足夠並紀錄著剛調校的結果.這樣就完成了自動微調程序了.
另外, 高轉速停旋會比低轉速感覺來的穩, 所以在IDLE下自動微調效果會比Normal 來的好. 但在自動微調之前,我建議尾舵感度都要調到適當.也就是說基本上 Normal, IDLE 在偏移量上應差不多. 起飛後, 馬上切IDLE.停懸過60秒再切 Normal 下來, 只要滯空時間過60秒, 下來您看 Vbar 在自動微調右方的時間軸上是綠色即可. 因為當你ELEV/AILE放手讓 VBar 自動調整時,這時間的累積如果足夠,則右方會為綠色.表示自動微調的時間夠了.所以只要當你放入讓 VBar 介入時在IDLE即可.不過如您在自動微調完,又有動到其他專家模式參數,部分依然可能影響到自動微調的結果.所以有時反而在風大下完成自動微調時, 自旋反而會晃動. 或因天候,風向,風速都會影響.所以我才建議用十字盤旋轉功能來調..
以集體螺距為+-12度的例子來說.自動微調介入的條件為.
1.集體螺距在 -2 ~ +8 , 所以我建議在+2度左右起飛是為了防呆.
2.搖桿沒有輸入的時間 > 0.3秒.
6.尾舵對集體螺距補償調整
進行正螺距拉昇動作. 並且注意在拉昇過程中機體是否依然保持水平.如果尾舵在拉昇過程中或在正負螺距轉換時,尾旋翼會略為右偏再回來.這時就要調高下方畫面中 "尾部旋轉翼/扭矩預設補償/螺旋總距" , 一次以3單位為基準.反之如略為左邊再回來則表示補償過多,而要降低設定值.
7.尾舵煞車力道調整
在原地快速順時針/逆時針自旋數圈再急煞停, 查看煞停的力道是否足夠或太大. 在Pro 尾舵設定裡,停止增益A,B 跟控制回路裡的左右數值的意義.以下都以主旋翼是順時針旋轉的直昇機為主.
停止增益A: 是指遙控器尾舵搖桿由右回到中立點的煞車力度.
停止增益B: 是指遙控器尾舵搖桿由左回到中立點的煞車力度.
8.尾旋翼控制回路最優化
電腦準備動作
一樣進入VBar設定電腦畫面並接上VBar. 在尾部旋轉翼裡的專家選項中的左下角, 把控制回路”最優化”選項打勾.以主旋翼為順時針旋轉的直昇機來說.控制回路左方數值是控制逆時針旋轉速度,也就是尾舵往左打;右邊數值則是控制順時針旋轉速度,也就是尾舵往右打.原來預設值是30 30.
控制回路裡左方數值代表遙控器尾舵搖桿由中立點向左再回中立點的行程反應速度.
控制回路裡右方數值代表遙控器尾舵搖桿由中立點向右再回中立點的行程反應速度.
數值愈大,小量的搖桿行程就有愈大的反應.
進行尾旋翼控制回路最優化自動微調
以我自己的實作為例. 昇空後,定點尾舵左右打到底自旋幾次.每次自旋約3-4圈再換邊.來回二至三次即可降落.這時Vbar 自動調校由原來的 30 30 變為 38 28.這時再昇空試機,吼.原本是順逆時針自旋速度不一,現在已很接近.再航道試一下,左彎的反應明顯靈敏很多.而右彎則略慢.所以我在降落後.把數值調為 35 31. 再昇空試機,左右自旋速度OK.而左右迴轉的手感已很接近,讚啊.
9.主旋轉翼陀螺增益調校
在高速航道中急速迴轉, 如果感覺機體有點變反應遲緩或槳有點失速.可調下列幾項
A.調降主主旋轉翼陀螺增益調校.
B.調昇"主旋轉翼/專家模式/模擬副翼"值 10單位.
模擬副翼的功能跟調遙控器的 EXPO為負值(加速)功能上是一樣,但調控的EXPO會破壞遙控器訊號的線性度.而模擬副翼則是在不改變遙控器訊號的線性度,加速主旋翼面的反應速度.
10. 主旋轉翼控制回路最優化調校
在主旋轉翼中的敏捷度是指整體的滾轉率,VBar系統自動會平均分在專家模式控制回路優化裡的升降及副翼中.但如果您覺滾轉,桶滾速度不一,可以用控制回路最優化進行調校,特別是在滾/桶轉中做停止的手感.做法是打勾"主旋轉翼/專家模式/控制回路" "最優化", 再昇空, 持續以控的升降、副翼控制桿打到底的方式進行滾轉及桶滾數圈再停止.再滾轉及桶滾數圈再停止.這時VBar 會自動調整二軸面的滾轉率.完成後,建議取消最優化功能後,再昇空試機,再手動微調手感.較大的值則機子在這軸面的滾轉會加快,反之則變慢。
但要注意,如果VBar log 持續出現 cyclic ring active的訊息,表示這次控制回路的滾轉率超出循環環的限制,所以此次優化的建議滾轉率會因循環環限制而失準。
而Mikaod認為的最佳控制回路的升降、副翼比例是多少?官方建議可以在一般前進飛行時做Loop, 當機子拉昇至1/4 Loop時,機體應呈垂直狀態,這時正負P來回幾次,也就是垂直鐘擺。如果機身依舊保持垂直,則表示這控制回路值組成剛好,如果機首會偏離垂直則不合宜。
一旦你微調了控制回路裡升降、或副翼。不管是自動調或手動調整,就不要再調整敏捷度了,不然Vbar預設又會把控制回路的升降及副翼分別設為敏捷度的一半。
後記:
------------------------------------------------------------------------------------------
自動微調的時機,
以下是我個人經驗,
有一次自動微調值差很多, 主要是尾舵感度不夠.結果變成尾舵要補償很多.所以我會建議,各項調完或在機械結構上有改變,如連桿長度.再做自動微調.
如主旋翼在訂完敏捷度,增益,升降舵預設補償,模擬副翼完才做控制回路最佳化.譬如,你做完控制回路最佳化後,假設是 60/40, 結果你又調了敏捷度,這時控制回路又會變成 50 50 (除以2).
而尾舵也是在調好感度,停止增益AB,扭矩預設補償才做控制回路最優化.而尾舵 P, I 比例我不建議改動, 因為如 I 是跟扭矩預設補償成對比的, I 昇高.扭矩預設補償就要降, 反之亦然..
等到這些都做好.再來自動微調就會更精準...假設一開始就自動微調..結果後來又調了主旋翼 / 尾舵感度.那升降/副翼/尾舵補償的結果應會不同.但如果你停懸穩定,慢速自旋不會偏移...我建議自動微調就不用做了^^
以下是這陣子的 VBar Pro 調機心得.不過這只是個人心得,每人手感都不同, 供大家參考.
因為遙控器只是給Vbar 訊號, 再由 VBar 決定伺服要打多少.所以保持遙控器訊號的線性度再來調機是很重要的.
當你在調手感時,如果覺得機子有點飄.這時有人會認為抓不住,反而加大 EXP.但這是剛好相反.因為控的訊號給太慢,而造成機子反應慢.那種感覺不是溜.
所以建議把 VBar 內建的 EXP都取消,就是在下圖中.主旋翼跟尾舵的專家模式裡的"指數".主旋翼是15%, 尾舵是50%都設為0%. 再來用控來控制. 而 EXPRESS 這內建的EXP是無法取消的.
先把 ELEV/AILE DR/EXPO 先為 100/20,習慣了再調100/10,習慣了再調 100/0
如覺太溜 (不黏手) 是用風格去控制, 一次以10單位來調整. 而不是改變遙控器的EXP.
而尾舵的遙控器 DR/EXP: 100/30-40 或 100/20.
1. 用控制回路調整左右自旋速度, 左邊調左旋, 右邊調右旋.
2. 用停止增益 AB 來調整煞車力道, 也就是遙控器尾舵由外側回到中立點時,VBar要提高多少增益來煞車.停止增益 A 是調右旋煞停, 停止增益 B 是調左旋煞停.
3. 上下大P時,如在改變正負P會跑,則提高尾舵對集體螺距的補償.
所以在儘量保持遙控器的訊號線性度前提下
1.用風格來控制"黏手度",(滑溜度)
2.用敏捷度來控制最大滾轉率
3.尾舵用控制回路來控制左右自旋速度
這樣機子會更精準, 穩中帶利. 完全在你手中. 等於"實機模擬器",每次的調整先飛一,二趟去習慣它.接著機子就跟你合為一體而完全同步,享受"人機一體"的FU
[ 本帖最後由 lliu0130 於 2012年12月12日 02:28 PM 編輯 ] |
上一篇:今天中午福德我包場下一篇:VBar 5.3.4 釋出
|


 發表於 2012年11月10日 08:55 PM
發表於 2012年11月10日 08:55 PM

 樓主
樓主